 En Castellano
/
En Castellano
/
 In English
In English
Research Project
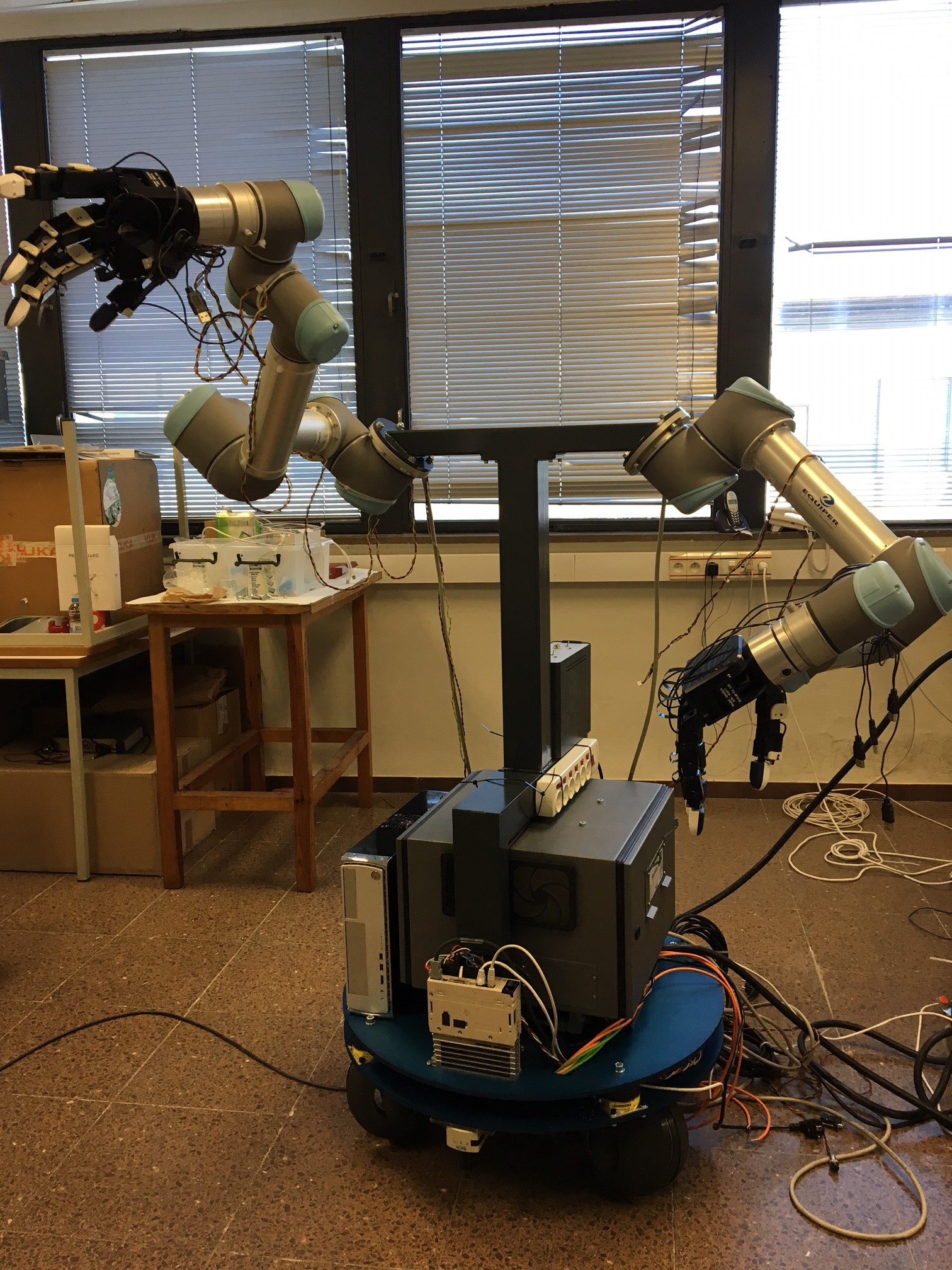
Dexterous Robots as Coworkers with Human Operators (AUDECO)
|
TITLE: Dexterous Robots as Coworkers with Human Operators Acronym: AUDECO REFERENCE: DPI2016-80077-R PERIOD: 1/1/2017- 31/12/2020 PROJECT LEADER 1: Raúl Suárez Feijóo Email: raul.suarez@upc.edu Phone: +34-934016548/6654 PROJECT LEADER 2: Jan Rosell Gratacòs Email: jan.rosell@upc.edu Phone: +34-934017162/6654 CENTER:Institut de Organització i Control de Sistemes Industrials (IOC) Universitat Politècnica de Catalunya (UPC) KEYWORDS: robotics, dexterous manipulation, mobile manipulators, human-robot interaction, task and motion planning |
